
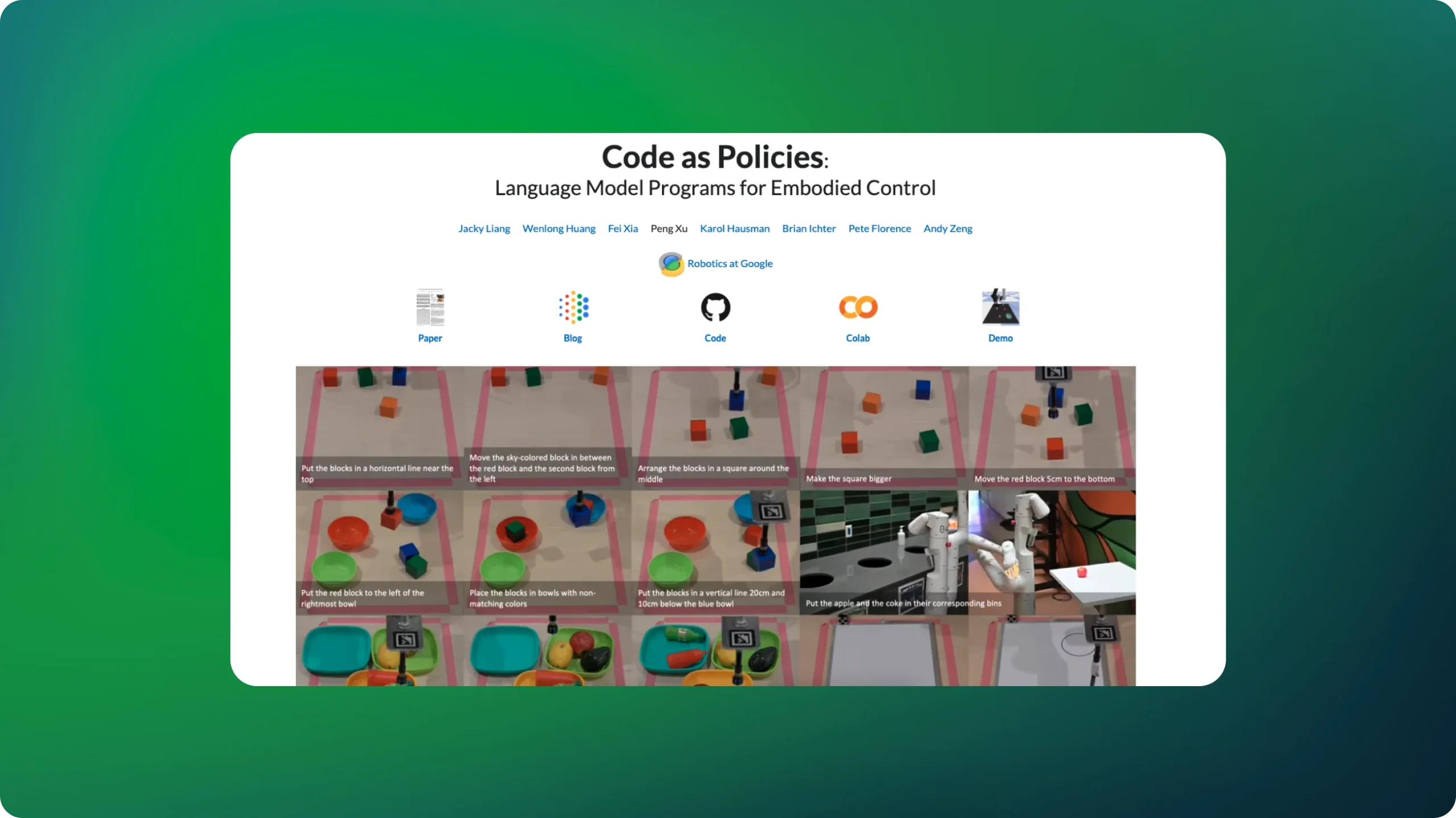
Code as Policies is a system that utilizes large language models (LLMs) to produce programs that function as policies for robotic operations. By understanding natural language inputs, these models generate code that guides robots in performing complex actions, merging perception with control. This method enables the development of both reactive and waypoint-driven policies, supporting sophisticated robotic behaviors across various platforms. The system highlights the use of hierarchical code generation to handle complex tasks, boosting the versatility and capabilities of robotic systems.
Some of the applications of Code as Policies:
- Building robotic systems that can carry out intricate, multi-step tasks based on natural language commands.
- Improving robot adaptability by applying code-generated policies for a variety of uses.
- Advancing AI-powered robotics research by combining language models with program creation.
- Introducing flexible and understandable control systems for robotic platforms.